Sehen, verstehen, navigieren: Smartphone-Sensorik als Gehirn des Haushaltsroboters


Warum Rechenpower direkt auf dem Gerät zählt
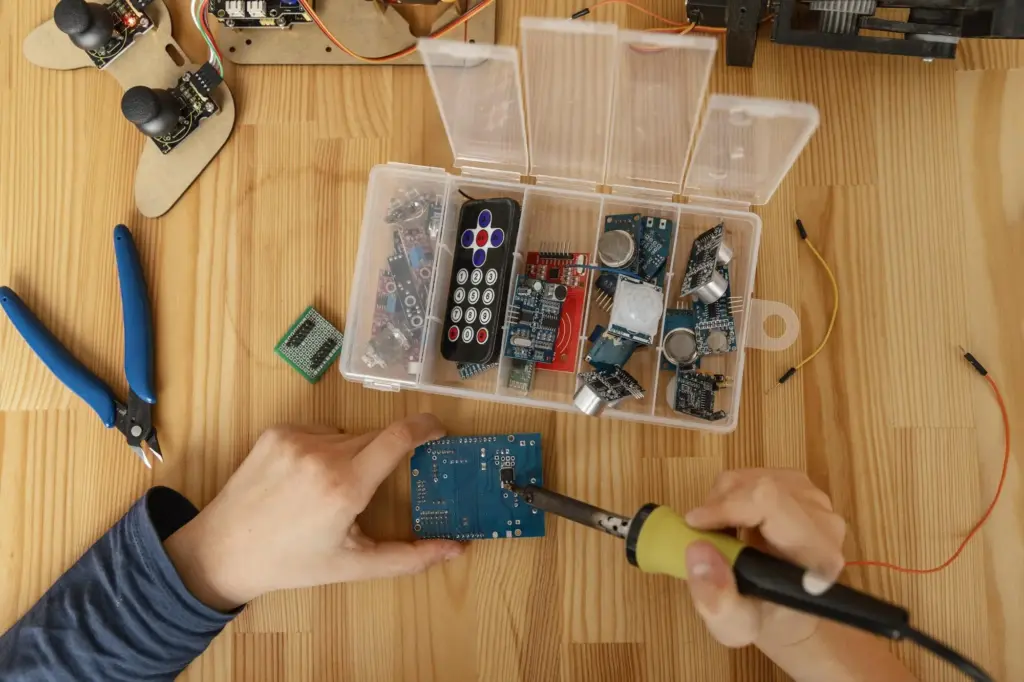
Sensoren im Smartphone: Ein reich gedeckter Tisch

Navigation in engen Räumen: Karten, Pfade, Taktik
Topologische und metrische Karten vereinen
Pfadplanung in Echtzeit auf mobilen Chips
Robuster Betrieb: Beleuchtung, Spiegel, Teppiche
Von Idee zu Prototyp: Toolchain, Modelle, Tests
Fragen stellen, Hypothesen testen
Beschreiben Sie Situationen, in denen Ihr System schwankt: spiegelnde Schrankwände, herumtollende Haustiere, steile Lichtwechsel. Formulieren Sie klare Hypothesen und bitten Sie um Gegenbeispiele oder Bestätigungen. Zusammenhänge zwischen Drift und Belichtung werden so sichtbar. Je präziser die Frage, desto hilfreicher die Antworten. Und oft genügt ein frischer Blick, um einen einfachen, wirkungsvollen Fix zu finden, der plötzlich ganze Korridore stabilisiert.
Gemeinsame Datensammlungen und Benchmarks
Eine kleine, kuratierte Sammlung realer Wohnungsfahrten mit Synchronzeitstempeln, Ground-Truth-Marken und Störszenarien hilft allen. Standardisierte Benchmarks fördern ehrliche Vergleiche und schnelle Verbesserungen. Teilen Sie Päckchen mit wenigen, aber kniffligen Sequenzen. So wächst eine Testkultur, die robuste Lösungen belohnt, statt nur Laborrekorde. Am Ende profitieren Nutzer, weil Systeme alltagstauglicher werden, und Entwickler, weil Fortschritt sichtbar und reproduzierbar bleibt.
Mitbauen: Vom Telefon zum fahrenden Helfer
Starten Sie ein Wochenendprojekt: Telefon auf ein günstiges Fahrgestell, ROS 2 Bridge, Kamera nach vorn, IMU sauber montieren. Beginnen Sie mit einfacher visueller Odometrie, fügen Sie semantische Segmentierung hinzu und testen Sie in Flur und Küche. Teilen Sie Videos, Parameterdateien und kleine Pannen. Andere lernen mit, schlagen Verbesserungen vor und feiern gemeinsam, wenn das Gerät endlich selbstständig zur Ladestation zurückrollt.

